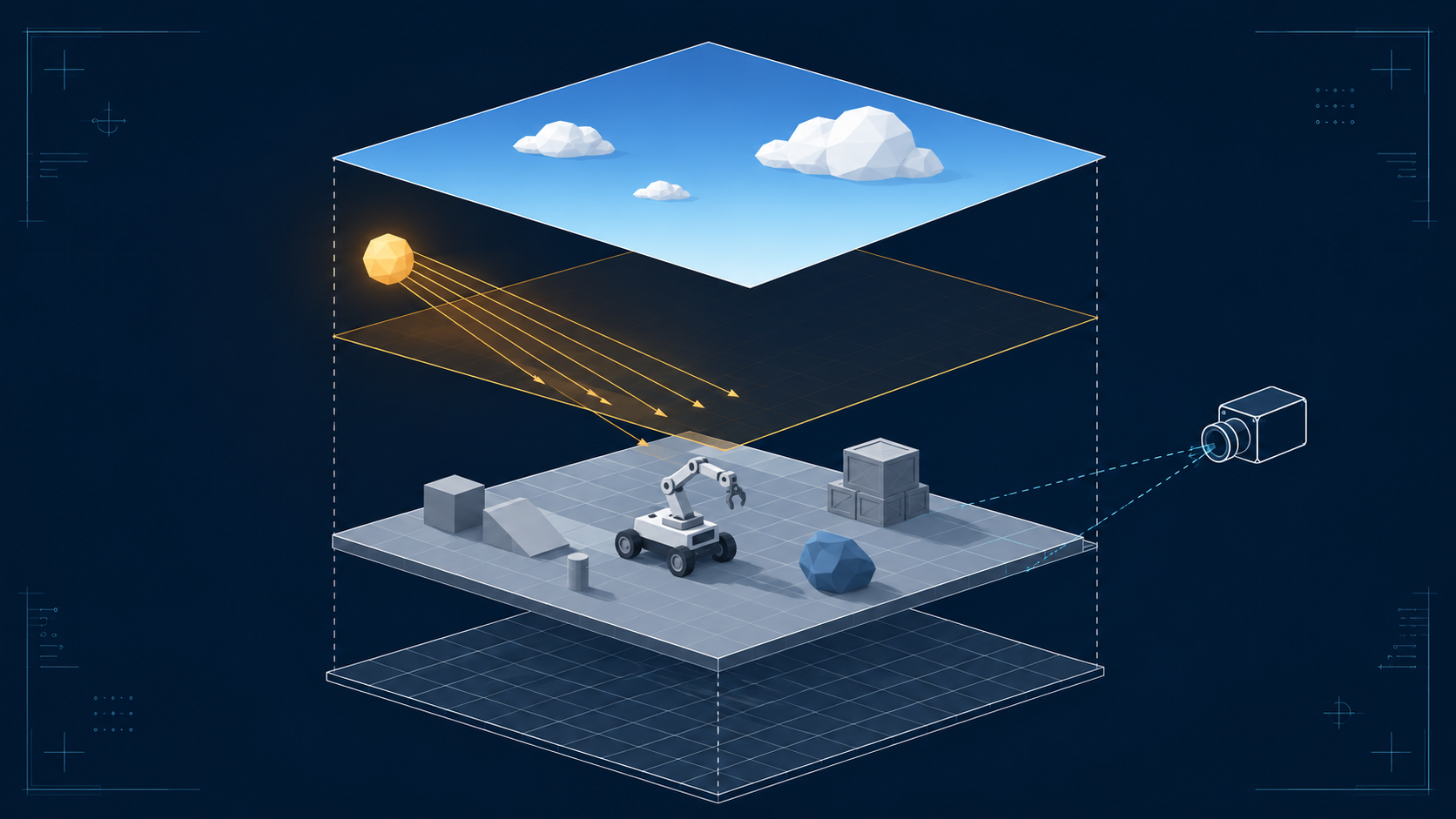
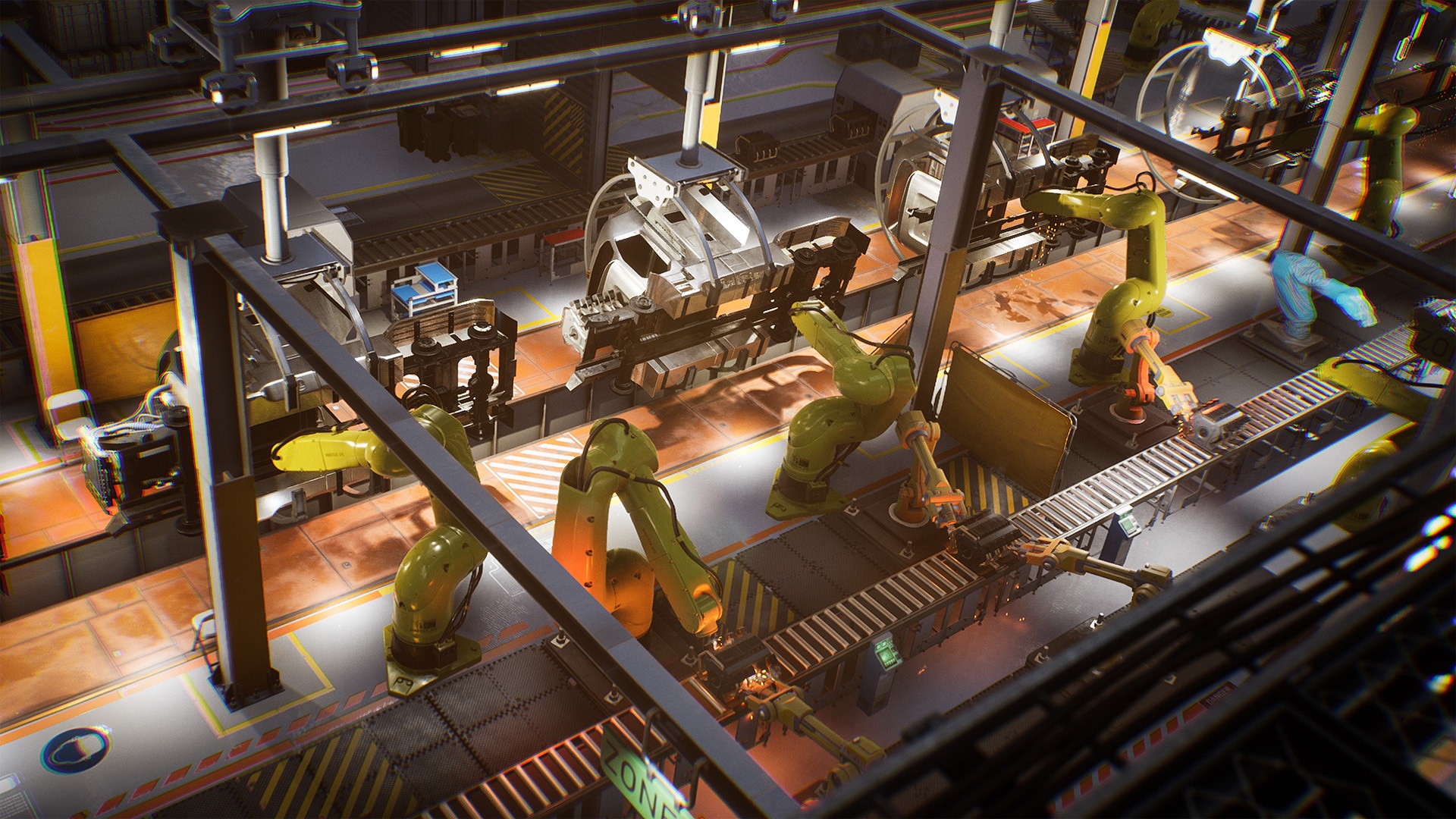
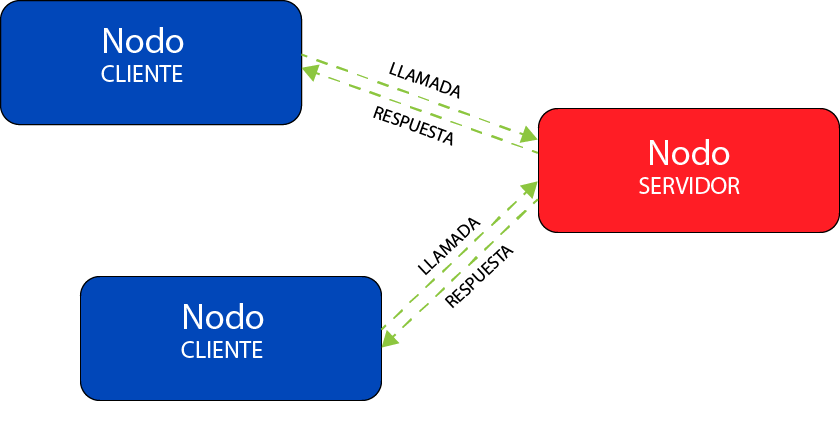
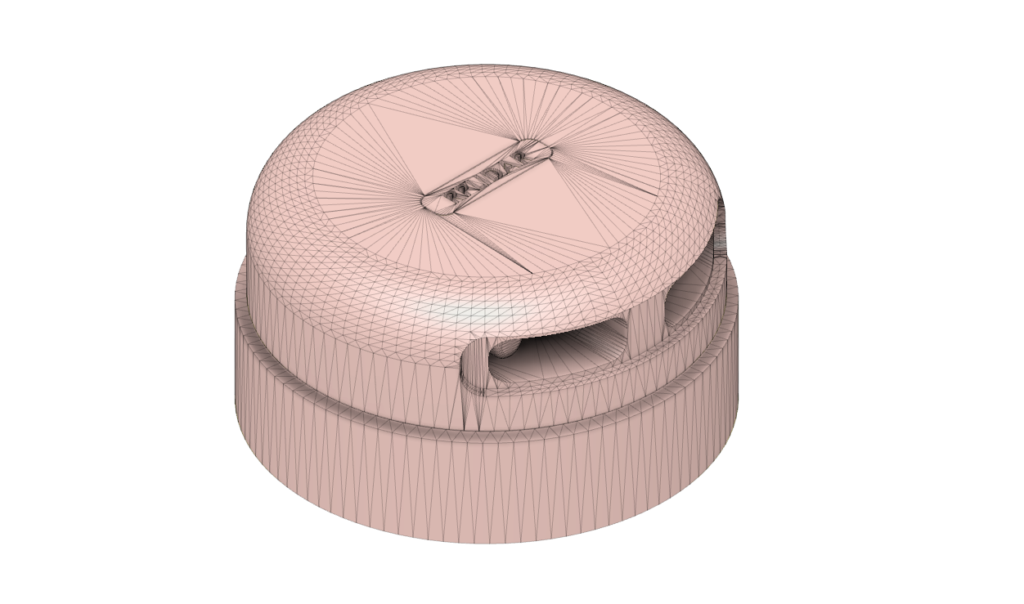
Últimos artículos 0 8 Gazebo Anatomía de un mundo SDF en Gazebo Jetty desde cero Posted on4 de julio de 20265 de julio de 2026 0 178 ROS2SIMULACIÓN Simulación con motores de videojuegos y ROS2 Posted on27 de noviembre de 202327 de noviembre de 2023 0 85 Sin categoría Usando parámetros en nuestros nodos Posted on22 de febrero de 20236 de julio de 2026 0 284 ROS2 ROS2. Aprende cómo usar servicios con Python Posted on15 de septiembre de 20226 de julio de 2026 0 298 ROS2 ROS2. Publicadores y Subscriptores Posted on15 de agosto de 20226 de julio de 2026 Artículos populares ROS2SIMULACIÓN Usando archivos mesh en nuestro modelo URDF Posted on1 de agosto de 20226 de julio de 2026 3 781 ROS2SIMULACIÓN Todo lo que necesitas saber de los archivos URDF Posted on20 de mayo de 20226 de julio de 2026 0 401 ROS2 ROS2. Publicadores y Subscriptores Posted on15 de agosto de 20226 de julio de 2026 0 298 ROS2 ROS2. Aprende cómo usar servicios con Python Posted on15 de septiembre de 20226 de julio de 2026 0 284 ROS2SIMULACIÓN GAZEBO. Cómo añadir un modelo URDF a una simulación Posted on5 de agosto de 20226 de julio de 2026 0 233 ROS2SIMULACIÓN GAZEBO. Como cargar un archivo world Posted on22 de julio de 20226 de julio de 2026 0 230 ROS2SIMULACIÓN Cómo revisar los archivos URDF Posted on30 de junio de 20226 de julio de 2026 0 180 ROS2SIMULACIÓN Simulación con motores de videojuegos y ROS2 Posted on27 de noviembre de 202327 de noviembre de 2023 0 178 SIMULACIÓN Crea el modelo URDF de tu robot con Fusion360 Posted on13 de febrero de 202226 de julio de 2022 1 168 ROS2 ROS2. Resumen de código Posted on26 de julio de 20226 de julio de 2026 0 111