Simulación con motores de videojuegos y ROS2
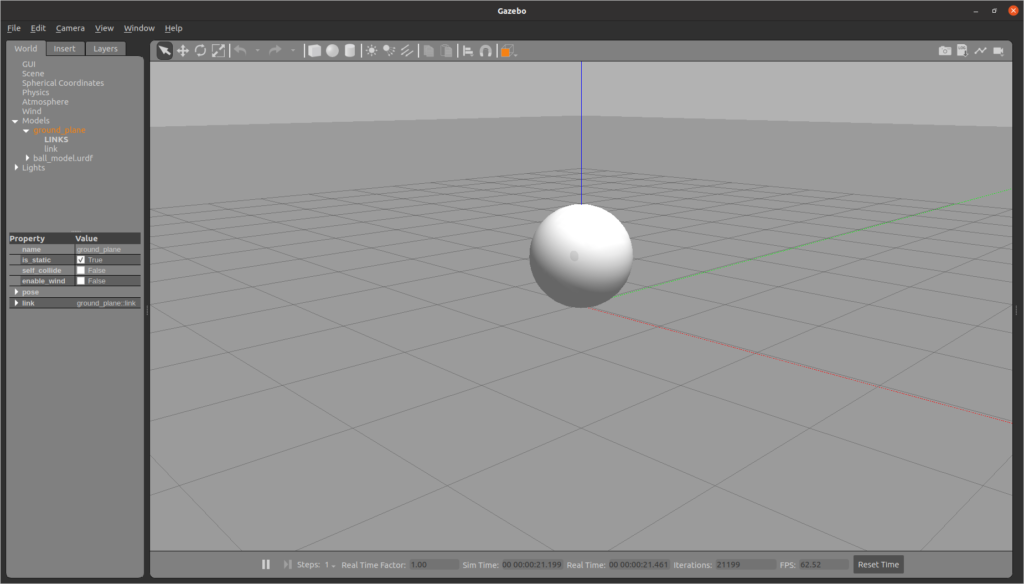
Introducción Para realizar simulaciones en robótica tenemos diferentes entornos que podemos usar con ROS2, como Gazebo, Webots, CoppeliaSim, o Nvidia ISAAC Sim, siendo Gazebo el más usado con diferencia. Todos ellos están diseñados específicamente para la simulación de robots, ofreciendo herramientas y características centradas en la física y dinámica de los mismos, la interacción […]
Simulación con motores de videojuegos y ROS2 Leer más »