Anatomía de un mundo SDF en Gazebo Jetty desde cero
Aprende a construir un mundo Gazebo Jetty desde cero, entendiendo cada elemento de su fichero SDF.
Anatomía de un mundo SDF en Gazebo Jetty desde cero Leer más »
Aprende a construir un mundo Gazebo Jetty desde cero, entendiendo cada elemento de su fichero SDF.
Anatomía de un mundo SDF en Gazebo Jetty desde cero Leer más »

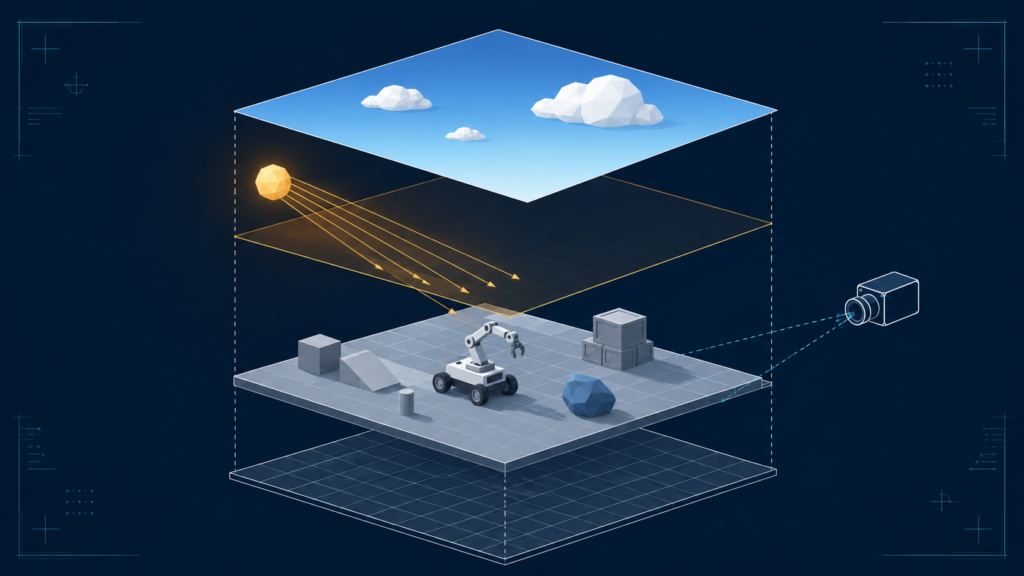
Introducción Para realizar simulaciones en robótica tenemos diferentes entornos que podemos usar con ROS2, como Gazebo, Webots, CoppeliaSim, o Nvidia ISAAC Sim, siendo Gazebo el más usado con diferencia. Todos ellos están diseñados específicamente para la simulación de robots, ofreciendo herramientas y características centradas en la física y dinámica de los mismos, la interacción
Simulación con motores de videojuegos y ROS2 Leer más »

Introducción Un parámetro es un valor de configuración de un nodo. Se puede pensar en los parámetros como configuraciones de nodo. Los parámetros admiten los siguientes tipos de valores: Booleano. Número entero. Número en coma flotante. Cadena de texto. Un array de los tipos anteriores. Un array de bytes. En ROS2 no hay un servidor de
Usando parámetros en nuestros nodos Leer más »
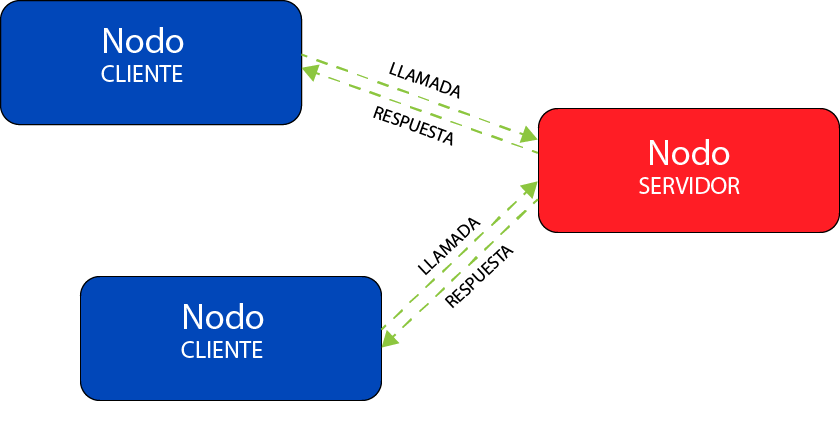
En este artículo aprenderás a comunicar dos nodos mediante un servicio usando Python.
ROS2. Aprende cómo usar servicios con Python Leer más »

1 Introducción En ROS los nodos se comunican entre sí empleando topics. El concepto de topic podría asemejarse a un bus de datos al que se le asigna un nombre, pudiendo algunos nodos (denominados publicadores) conectarse al mismo para escribir mensajes y otros (denominados subscriptores) para recibirlos. En este artículo vamos a crear un nuevo
ROS2. Publicadores y Subscriptores Leer más »
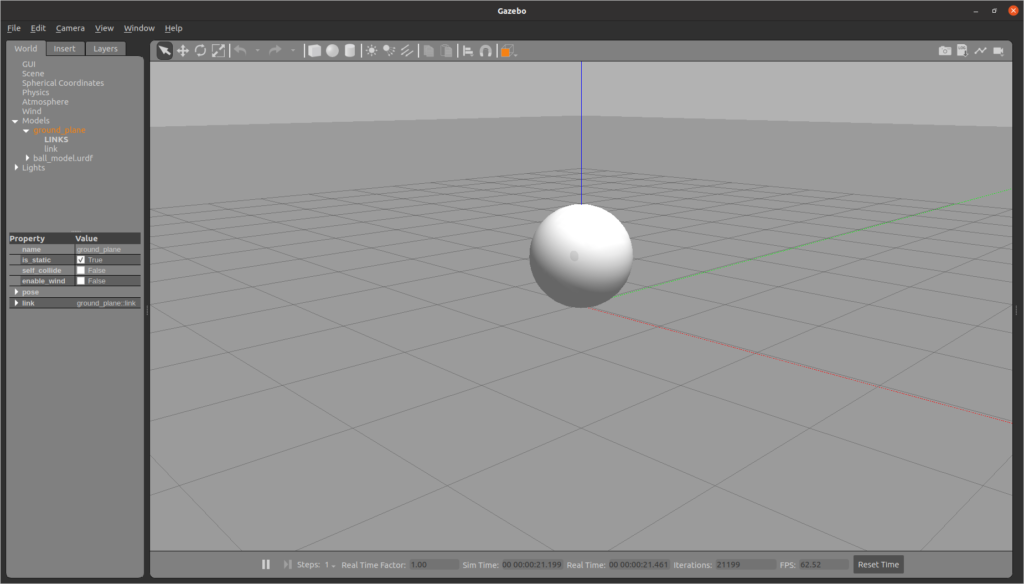
1. Introducción En este artículo vas a aprender cómo hacer aparecer (spawn) un modelo URDF en GAZEBO. Básicamente hay dos formas de hacerlo: Usando el servicio /spawn_entity del paquete gazebo_msgs. Usando el nodo spawn_entity.py del paquete gazebo_ros. En los siguientes apartados vamos a ver como añadir a nuestra simulación un modelo URDF muy simple, consistente
GAZEBO. Cómo añadir un modelo URDF a una simulación Leer más »
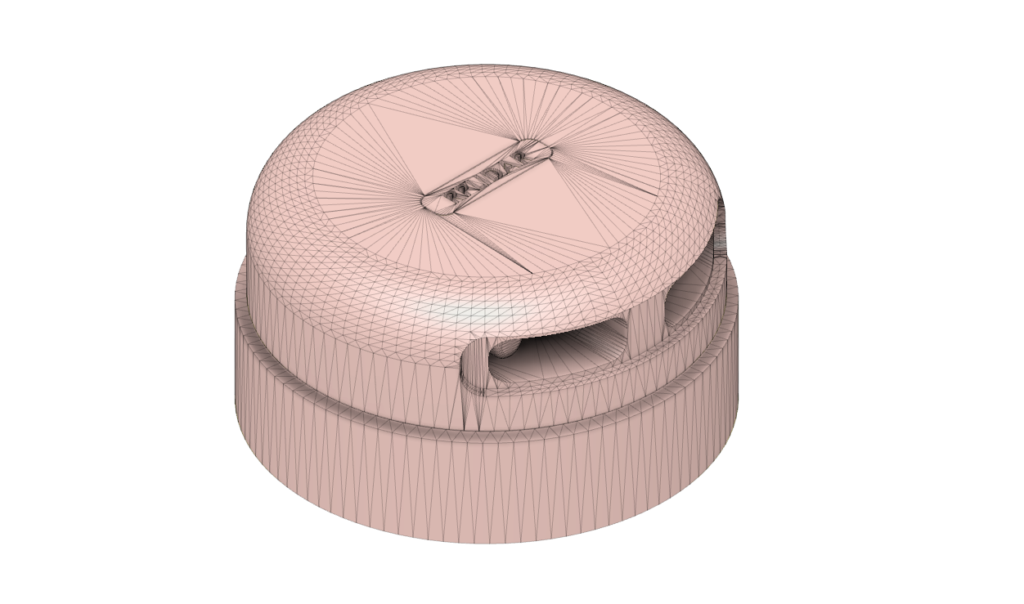
Dota a tus modelos de un mayor realismo utilizando geometrías de malla mediante archivos mesh.
Usando archivos mesh en nuestro modelo URDF Leer más »
En muchas ocasiones necesitamos añadir carpetas adicionales a las que inicialmente se generan cuando creamos un paquete Python. Por ejemplo es muy habitual incluir carpetas como launch o config. Sin embargo, si simplemente creamos dichas carpetas, estas no se incluirán de forma automática en la instalación del paquete al compilarlo. Para ello hace falta modificar
ROS2. Añadiendo carpetas adicionales a nuestro paquete Python Leer más »
En este artículo encontraras código de uso habitual en la programación con ROS2.
ROS2. Resumen de código Leer más »

En este artículo aprenderemos a crear un paquete Python en ROS2. Para ello lo primero es tener un espacio de trabajo (workspace). En el caso de que no sepas como crearlo puedes consultar el artículo: Que es y como generar un espacio de trabajo. Si ya tenemos uno solo hay que ir al directorio src
ROS2. Cómo crear un paquete Python Leer más »