GAZEBO. Cómo añadir un modelo URDF a una simulación
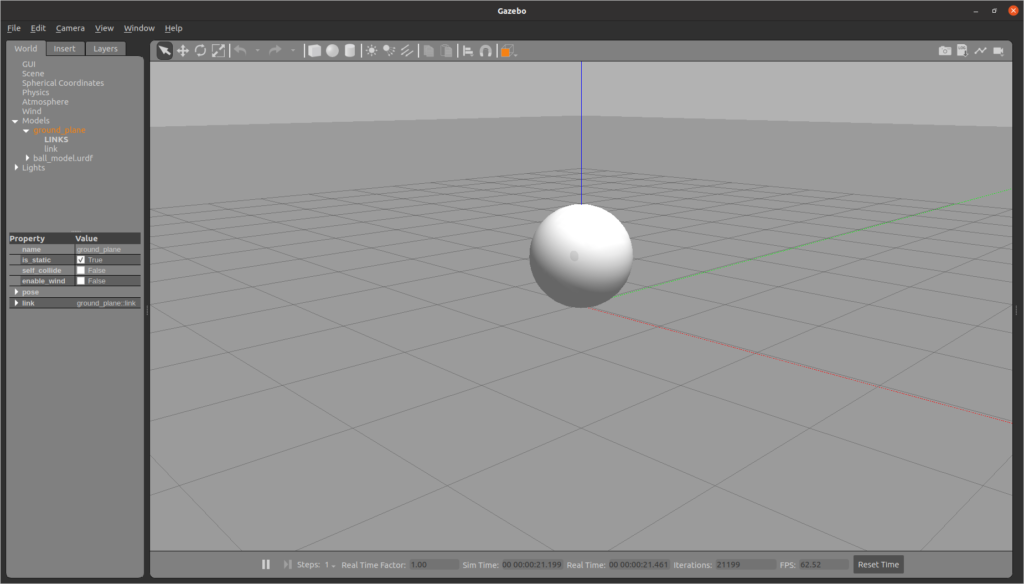
1. Introducción En este artículo vas a aprender cómo hacer aparecer (spawn) un modelo URDF en GAZEBO. Básicamente hay dos formas de hacerlo: Usando el servicio /spawn_entity del paquete gazebo_msgs. Usando el nodo spawn_entity.py del paquete gazebo_ros. En los siguientes apartados vamos a ver como añadir a nuestra simulación un modelo URDF muy simple, consistente […]
GAZEBO. Cómo añadir un modelo URDF a una simulación Leer más »